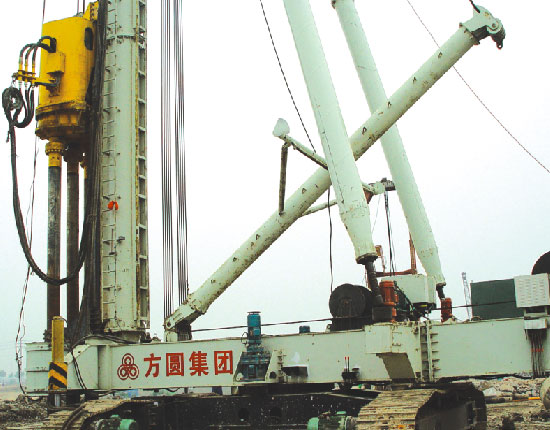
1. The main material of the structure is high-strength steel, and the main limb structure of the tower body standard section is made of seamless steel pipe, which has high stability;
2. The lifting mechanism is driven by a variable frequency motor with an encoder and variable frequency control. It can also be driven by a dual speed wound motor with eddy current braking. The lifting speed regulation performance is good, the operation is convenient, and the use is reliable;
3. Symmetrical arrangement of dual rotation mechanism, series resistance speed regulation of rotor winding motor, smooth start and stop, superior rotation performance;
4. The lifting arm can achieve various combinations of arm lengths such as 55, 50, 45, 40, 37.5, and 32.5 meters, making it convenient to use;
5. The anti detachment structure of the lifting crossbeam and the quick insertion structure of the frame platform enable quick and convenient installation of the tower crane;
6. The production process of the product is more mature and reliable, ensuring product quality.

There are two options for configuring the lifting mechanism. When using a variable frequency motor with an encoder for driving, the motor has a built-in rotary encoder and is controlled by the frequency converter. It can achieve zero servo anti fall function, which means that in the event of brake failure, the heavy object will not suddenly fall and has a protective function; A dual speed wound motor with eddy current braking can also be used to drive a variable resistor in series for speed regulation, allowing for slow positioning, high-speed operation, reliable use, and simple maintenance. The lifting reducer is designed as a four axis type, and the drum is of a thick and short type, which improves the service life of the steel wire rope.

The double rotating mechanism is symmetrically arranged, and the rotating support has installation positioning steps. The double-sided rotating small gears have high meshing accuracy with the rotating support, and the tower crane rotates smoothly. The rotary motor adopts a wound motor with a hydraulic coupling to drive the planetary gear reducer.

The anti detachment device of the lifting crossbeam effectively prevents the crossbeam pin shaft from falling off during the tower lifting process.


The lower chord of the crane arm is made of pointed square tube, which increases the safety of the trolley operation.

The main components are welded by robots, and the weld strength is stable and reliable.
| name | Company | parameter | ||||||
|---|---|---|---|---|---|---|---|---|
| Rated lifting torque | kN.m | six hundred and thirty | ||||||
| Maximum lifting capacity | t | six | ||||||
| Work range | m | 2~55 | ||||||
| Lifting capacity at maximum working range | t | one | ||||||
| Lifting height | m | Magnification ratio | Independent style | Adhesive type | ||||
| two | forty | one hundred and fifty | ||||||
| four | forty | seventy-five | ||||||
| Lifting performance | Magnification ratio |
|
two | four | ||||
| Lifting speed | m/min | eighty | forty | forty | twenty | |||
| Lifting capacity | t | one point five | three | three | six | |||
| Rotation speed | r/min | zero point six two | ||||||
| derricking speed | m/min | 40.5/20 | ||||||
| Lifting speed | m/min | zero point four two | ||||||
| Sectional dimensions of tower body | m | 1.6×1.6 | ||||||
| Balance weight | t | thirteen point five | ||||||
| working temperature | ℃ | -20~+40 | ||||||
| Whole machine power | kW | 34.7 (excluding lifting motor) | ||||||